

Dynamic Collaborative Multi-Agent Reinforcement Learning Communication for Autonomous Drone Reforestation
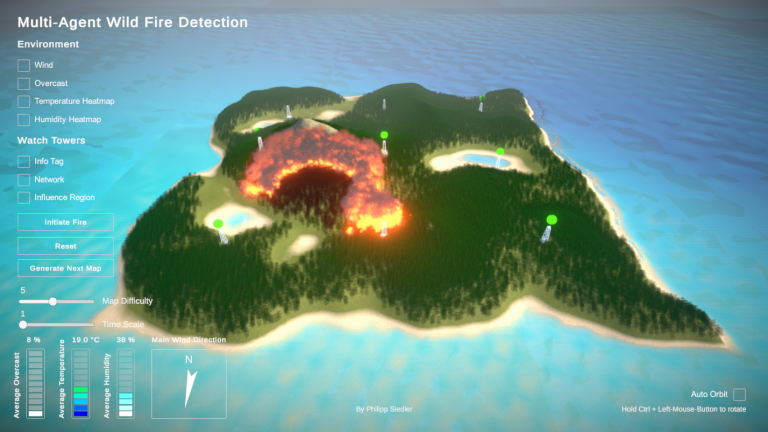
Multi-Agent Collaboration for Wild Fire Management Resource Distribution
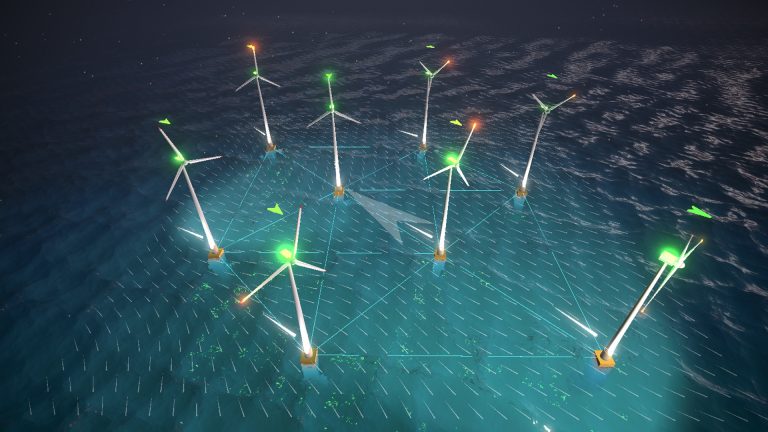
Multi-Agent Collaboration for Wind Farm Control
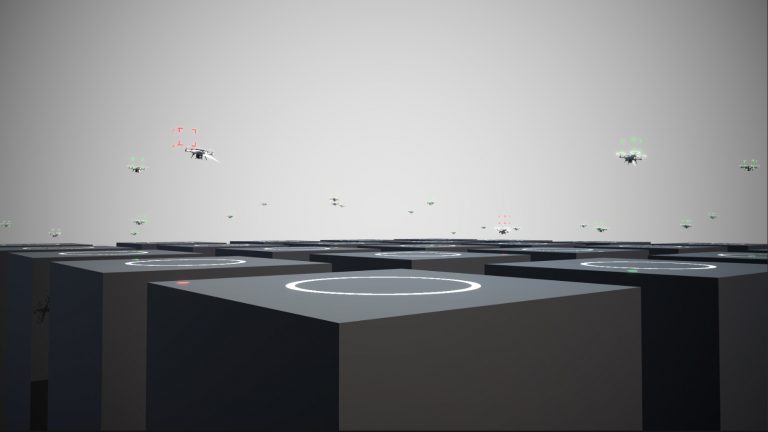
[WIP] Competitive Multi-Agent Collaboration for Drone Control and Package Delivery Tasks

Using Reinforcement Learning to Evaluate Navigability of Masterplan

Using Reinforcement Learning to Build a Tree
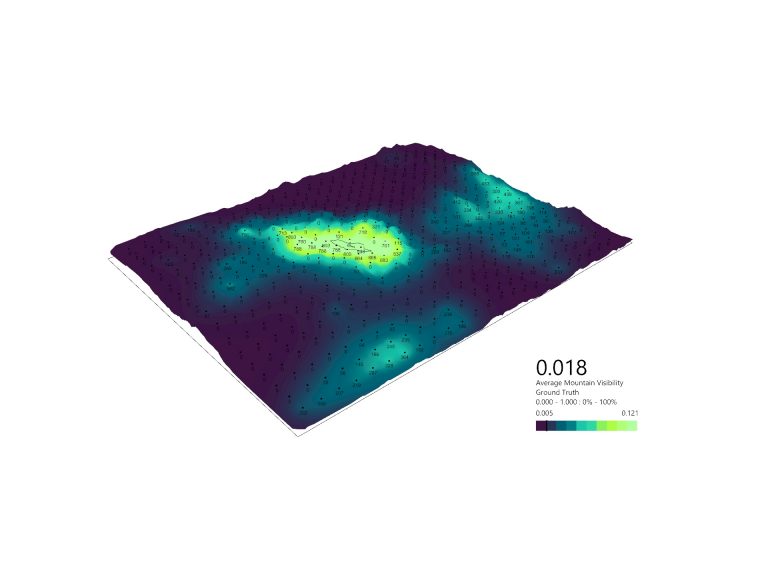
Average Exterior Visibility Prediction using Polynomial Linear Regression
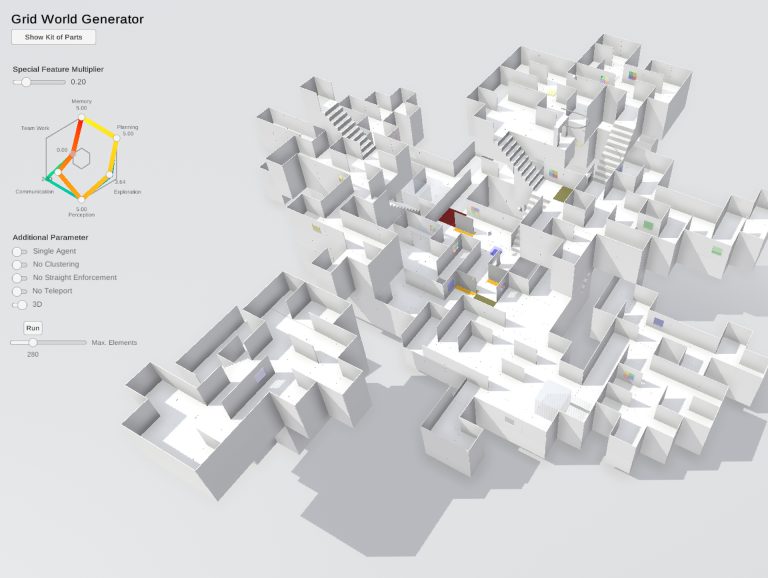
Procedural Programming to Generate Grid Worlds
Using Reinforcement Learning to Optimize Core and Atria Placement
Using Genetic Algorithm to Optimize Building Topology
